
Ricerca
Structure-based object category recognition
Si utilizza un sensore Microsoft Kinect, montato su un ground robot, per un'applicazione di riconoscimento oggetti a livello di categoria. Il principale contributo scientifico è lo sviluppo di una nuova sequenza di operazioni per modellare e riconoscere oggetti con cui un robot può interagire nel corso di una missione, sulla base dei dati di profondità rilevati dal Kinect. Gli oggetti sono riconosciuti non soltanto a livello di istanza (ad esempio, una specifica sedia), ma a livello di categoria (ad esempio, una sedia generica).
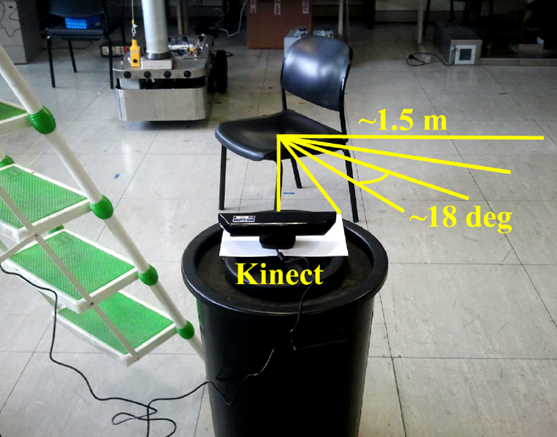
La nuvola di punti rilevata dal Kinect è segmentata in cluster di due tipi: tubi e piani. I cluster sono associati ai nodi di un grafo: gli archi del grafo rappresentano l'esistenza di particolari relazioni geometriche tra i cluster corrispondenti ai nodi connessi. Gli oggetti sono sia modellati che riconosciuti elaborando questi grafi. Se l'oggetto percepito non somiglia a nessuno dei modelli già appresi, viene creato un nuovo modello. La tecnica è testata su un dataset composto da oggetti come sedie, tavoli o altri robot. A seguito del riconoscimento, il robot può essere in grado di interagire diversamente con diverse categorie di oggetti, ad esempio spostando una sedia e aggirando un tavolo (troppo pesante per essere spostato) per raggiungere la propria destinazione.
Paper di riferimento: Structure-based object representation and classification in mobile robotics through a Microsoft Kinect, Antonio Sgorbissa, Damiano Verda Robotics And Autonomous Systems (RAS), December 2013
![]()