
Ricerca
Postdoc
Nel mio primo anno da postdoc ho lavorato come assegnista di ricerca presso il CNR-IEIIT di Genova: la mia ricerca si colloca all'interno del progetto bandiera Interomics e ha condotto anche all'introduzione di feature innovative all'interno della piattaforma Rulex. A seguito del postdoc, sono stato assunto da Rulex in cui, da marzo 2019, ricopro il ruolo di Head of Data Science.
Rulex
Rulex è una piattaforma di machine learning che comprende strumenti di ETL, tecniche standard di machine learning e anche algoritmi proprietari, come la Logic Learning Machine.
![]()
I miei contributi, inclusi nella release ufficiale a partire dalla versione 3.2, si inquadrano, ad esempio, nello sviluppo di task destinati ad applicazioni di association rule mining, sia per quanto riguarda il front-end che il back-end. Il back-end è sviluppato in linguaggio C++, l'interfaccia in Python. Oltre all'implementazione di tecniche note come l'algoritmo Eclat, il lavoro comprende anche lo sviluppo di tool innovativi, orientati al supporto e all'ottimizzazione di operazioni di complexity reduction e di assortment optimization.
Paper di riferimento:
A Novel Rule-Based Modeling and Control Approach for the Optimization of Complex Water Distribution Networks, Enrico Ferrari, Damiano Verda, Nicolò Pinna, Marco Muselli, Lecture Notes in Networks and Systems, Springer 2023
Validation of a predictive model for obstructive sleep apnea in people with Down syndrome, Brian G. Skotko, Alexandra Garza Flores, Ibrahim Elsharkawi, Vasiliki Patsiogiannis, Mary Ellen McDonough, Damiano Verda, Marco Muselli, Roberto Hornero, David Gozal, Eric A. Macklin, American Journal Of Medical Genetics, Part A, Novembre 2022
The clinical meaning of the area under a Receiver Operating Characteristic curve for the evaluation of the performance of disease markers, Stefano Parodi, Damiano Verda, Francesca Bagnasco, Marco Muselli, Epidemiology And Health, Ottobre 2022
LLM-PBC: Logic Learning Machine-Based Explainable Rules Accurately Stratify the Genetic Risk of Primary Biliary Cholangitis, Alessio Gerussi, Damiano Verda, Claudio Cappadona, Laura Cristoferi, Davide Paolo Bernasconi, Sandro Bottaro, Marco Carbone, Marco Muselli, Pietro Invernizzi, and Rosanna Asselta on behalf of The Italian PBC Genetics Study Group, Journal of Personalized Medicine, Settembre 2022
Machine learning in primary biliary cholangitis: A novel approach for risk stratification , Alessio Gerussi, Damiano Verda, Davide Paolo Bernasconi, Marco Carbone, Atsumasa Komori, Masanori Abe, Mie Inao, Tadashi Namisaki, Satoshi Mochida, Hitoshi Yoshiji, Gideon Hirschfield, Keith Lindor, Albert Pares, Christophe Corpechot, Nora Cazzagon, Annarosa Floreani, Marco Marzioni, Domenico Alvaro, Umberto Vespasiani-Gentilucci, Laura Cristoferi, Maria Grazia Valsecchi, Marco Muselli, Bettina E. Hansen, Atsushi Tanaka, Pietro Invernizzi, Liver International, Issue Cover Marzo 2022
Controllo automatico delle variabili cliniche della scheda di dimissione ospedaliera (SDO), mediante l’utilizzo di tecniche di machine learning, E. Montel, A. Richter, R. Vanzetta, S. Ladurner, A. Malizia, D. Verda, M. Muselli, P. Santin, P. Vian, Organizzazione Sanitaria, Marzo 2022
A New XAI-based Evaluation of Generative Adversarial Networks for IMU Data Augmentation, Sara Narteni, Vanessa Orani, Enrico Ferrari, Damiano Verda, Enrico Cambiaso, Maurizio Mongelli, IEEE International Conference on E-health Networking, Application and Services (HealthCom) 2022
Interomics
Il progetto bandiera Interomics è orientato allo sviluppo di una piattaforma integrata per l'applicazione delle scienze "omiche" alla definizione di biomarcatori e di profili predittivi e diagnostici.

Paper di riferimento:
Analyzing gene expression data for pediatric and adult cancer diagnosis using logic learning machine and standard supervised methods , Damiano Verda, Stefano Parodi, Enrico Ferrari, Marco Muselli, BMC Bioinformatics, Novembre 2019
Logic Learning Machine and standard supervised methods for Hodgkin’s lymphoma prognosis using gene expression data and clinical variables , Stefano Parodi, Chiara Manneschi, Damiano Verda, Enrico Ferrari, Marco Muselli, Health Informatics Journal, Marzo 2018
Dottorato
La mia attività di ricerca si è concentrata, durante il dottorato, nell'ambito della percezione robotica. Più specificamente, ho lavorato, come di seguito sinteticamente descritto, su tre progetti, che coinvolgono l'utilizzo di un laser scanner, un Mircrosoft Kinect e una telecamera. Tutti e tre i tipi di sensori sono utilizzati in robotica, dato che ciascuno è contraddistinto da punti di forza e da limiti: la scelta viene quindi operata secondo il contesto:
- un laser scanner assicura misure di distanza affidabili, ma rilevate su un piano di scansione e limitate da una distanza massima,
- una telecamera non è soggetta a tali restrizioni, ma estrarre un numero (variabile) di feature da un’immagine è un’operazione complessa e dall’esito non prevedibile,
- un Microsoft Kinect, pur avendo un costo contenuto, mette a disposizione, a prezzo di un ingombro maggiore, una nuvola di punti nello spazio tridimensionale. Risulta tuttavia limitato dalla distanza massima di scansione (4m) e sensibile alle condizioni di illuminazione, quindi poco adatto a un utilizzo outdoor.
Micro Air Vehicle (MAV) position tracking
Durante il periodo passato presso il Robotics and Perception Group dell'Università di Zurigo (guidato dal prof. Davide Scaramuzza) ho contribuito allo sviluppo di una tecnica di position tracking technique per Micro Air Vehicles (MAVs) puramente vision-based.

Paper di riferimento:
Air-ground Matching: Appearance-based GPS-denied Urban Localization of Micro Aerial Vehicles, Andràs L. Majdik, Damiano Verda, Yves Albers-Schoenberg, Davide Scaramuzza, Journal of Field Robotics (JFR), October 2015
Micro Air Vehicle Localization and Position Tracking from Textured 3D Cadastral Models, Andràs L. Majdik, Damiano Verda, Yves Albers-Schoenberg, Davide Scaramuzza, International Conference on Robotics and Automation (ICRA) 2014
Structure-based object category recognition
Si utilizza un sensore Microsoft Kinect, montato su un ground robot, per un'applicazione di riconoscimento oggetti a livello di categoria.
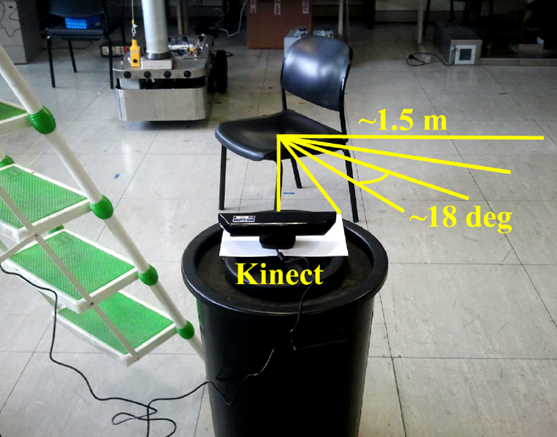
Paper di riferimento: Structure-based object representation and classification in mobile robotics through a Microsoft Kinect, Antonio Sgorbissa, Damiano Verda Robotics And Autonomous Systems (RAS), December 2013
Human localization and mapping
Scegliamo di utilizzare un laser scanner (in combinazione con una Inertial Measurement Unit, o IMU, costituita da accelerometri e giroscopi) per realizzare un’applicazione di generazione di mappe e auto-localizzazione basata su sensori indossabili.

Paper di riferimento: Human navigation and mapping with a 6DOF IMU and a laser scanner, Marco Baglietto, Antonio Sgorbissa, Damiano Verda, Renato Zaccaria Robotics And Autonomous Systems (RAS), December 2011
![]()